RSRD-segmentation dataset
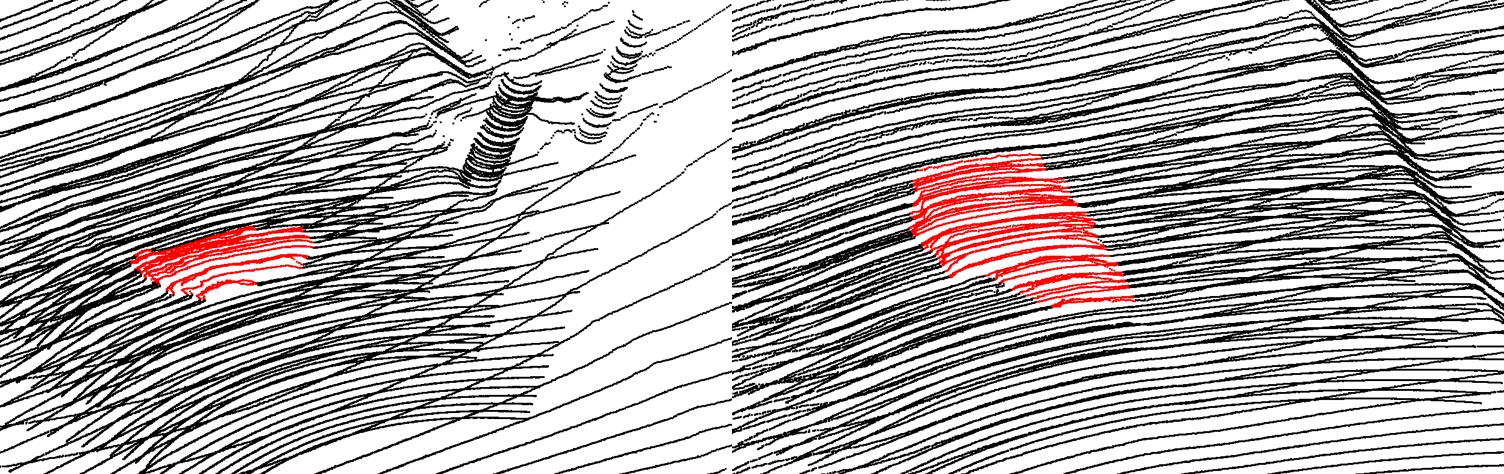
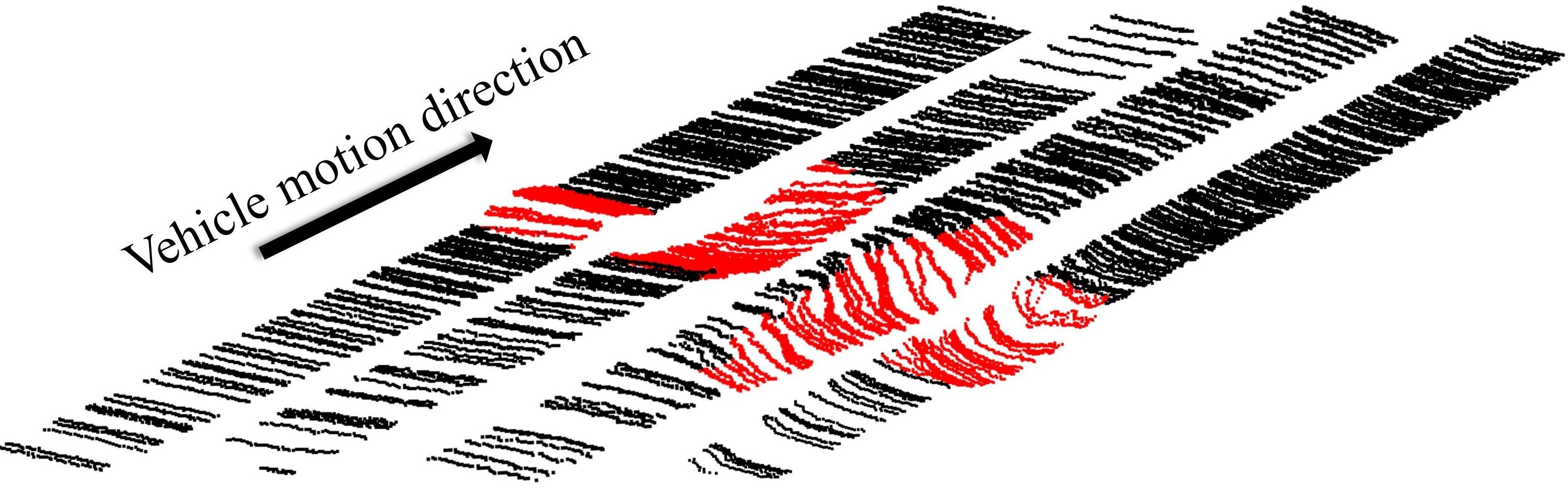
From RSRD, we pick out 63 point cloud samples with irregular unevenness such as bump/pothole. In the pcd files, the points belonging to bump/potholes are labeled as 1 (see the red points below). RGB values are also attached for points within image’s perspective. This prototype dataset can be used for bump/pothole segmentation.
As only road areas where tires pass will cause vehicle response, we further crop the complete road area into patches for the convenience of practical applications. There are 710 road point cloud patches in this prototype dataset.
Baseline
Please refer to our paper for more details.
Codes for reading data
import open3d as o3d
import numpy as np
pcd = o3d.t.io.read_point_cloud('XXX.pcd')
xyz = pcd.point.positions.numpy()
labels = pcd.point.label.numpy().reshape(-1).astype(np.int8)
# RGB information
b = pcd.point.b.numpy()/255.0
r = pcd.point.r.numpy()/255.0
g = pcd.point.g.numpy()/255.0
Citation
@ARTICLE{10329453,
author={Zhao, Tong and Guo, Peilin and He, Junxiang and Wei, Yintao},
journal={IEEE Transactions on Intelligent Vehicles},
title={A Hierarchical Scheme of Road Unevenness Perception With LiDAR for Autonomous Driving Comfort},
year={2024},
volume={9},
number={1},
pages={2439-2448},
doi={10.1109/TIV.2023.3337236}}